产品中心
联系我们
福建省福州市晋安区龙安路371号
传真:0591-83375868
机器视觉工件外观检测系统
来源:国化智能 阅读:
本产品是基于机器视觉的实现产品表面缺陷检测及产品位置坐标计算的系统。且工业机器人配移动追踪卡,能够实现抓取移动中产品的功能。
系统包括一套传送带系统、一套对射传感器检测组件、两套机器视觉系统、一套机器人抓取系统、一套PLC控制系统。其中,输送带用于将待检测产品从人工放料处输送至机器视觉识别区,对射传感器组件检测到有产品时,控制输送带停止。待输送带停止后,第一套机器视觉系统识别产品正面表面缺陷及几何尺寸,并识别产品中心坐标,将相关数据发送至机器人,引导工业机器人抓取该产品,移动至第二套机器视觉系统上方,用于检测产品反面表面缺陷及几何尺寸,根据两套机器视觉系统检测结果,将产品放入合格区或不合格区。同步输送带移动,将下一个产品输送至机器视觉识别器,反复循环。
主要是通过机器视觉定位静态工件并检测工件表面缺陷。
首先为了对工件进行定位并实现机器人抓取功能,需要对机器人进行基坐标的定位,然后通过使用标定板确定工件坐标系,同时对相机进行标定。从中获得相机坐标与工件坐标系的转换关系,再计算出工件坐标系与机器人基坐标转换关系。
然后在固定不变相机与机器人情况下进行工件定位与表面检测。开始进行人工上料,将工件放置于传送带上,待工件到达相机视野内时通过对射传感器发送信号给视觉控制器,控制器停止传送带运行,并启动相机拍照。
最后通过图像处理,找到工件中心位置,将该图像坐标转换为机器人基坐标后。控制器发送命令于机器人,机器人将工件夹取到另一个相机下进行拍照。
系统结构
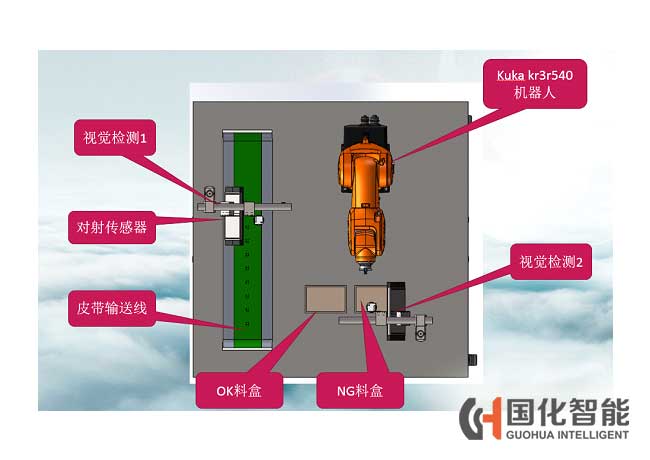
系统包括一套传送带系统、一套对射传感器检测组件、两套机器视觉系统、一套机器人抓取系统、一套PLC控制系统。其中,输送带用于将待检测产品从人工放料处输送至机器视觉识别区,对射传感器组件检测到有产品时,控制输送带停止。待输送带停止后,第一套机器视觉系统识别产品正面表面缺陷及几何尺寸,并识别产品中心坐标,将相关数据发送至机器人,引导工业机器人抓取该产品,移动至第二套机器视觉系统上方,用于检测产品反面表面缺陷及几何尺寸,根据两套机器视觉系统检测结果,将产品放入合格区或不合格区。同步输送带移动,将下一个产品输送至机器视觉识别器,反复循环。
主要是通过机器视觉定位静态工件并检测工件表面缺陷。
首先为了对工件进行定位并实现机器人抓取功能,需要对机器人进行基坐标的定位,然后通过使用标定板确定工件坐标系,同时对相机进行标定。从中获得相机坐标与工件坐标系的转换关系,再计算出工件坐标系与机器人基坐标转换关系。
然后在固定不变相机与机器人情况下进行工件定位与表面检测。开始进行人工上料,将工件放置于传送带上,待工件到达相机视野内时通过对射传感器发送信号给视觉控制器,控制器停止传送带运行,并启动相机拍照。
最后通过图像处理,找到工件中心位置,将该图像坐标转换为机器人基坐标后。控制器发送命令于机器人,机器人将工件夹取到另一个相机下进行拍照。
系统结构